| Version 69 (modified by , 2 years ago) ( diff ) |
|---|
編集中 Under edit
RoboCup JapanOpen 2024 Logistics League
競技概要 / Competition abstruct

- タスクは,RCLL Rulebook 2023のChallenge Trackになります.
The tasks are Challenge Track on RCLL Rulebook 2023.
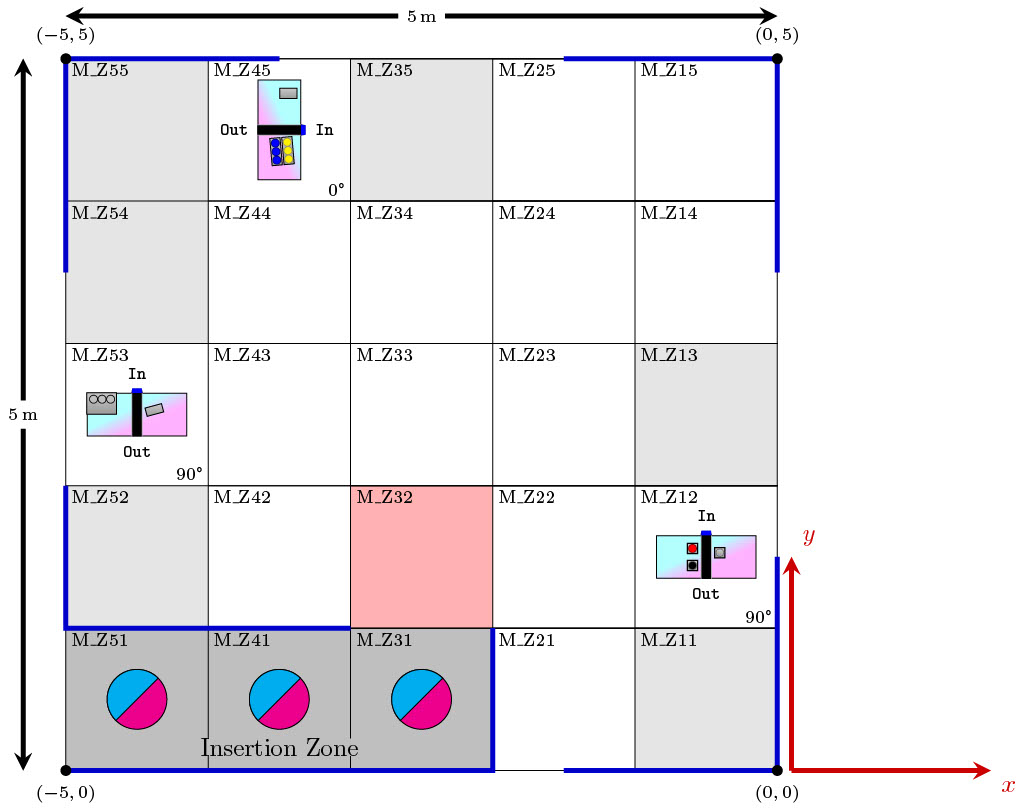
- フィールドは5x5のマスです.
The size of field is 5 x 5 squares.
- 図はRCLL Rulebook 2023のルールブックのフィールド図です.
The figure is figure of field on RCLL Rulebook 2023.
- ロボットは3台まで使用可,手前左のマス(M-Z31からZ51)からスタートし,フィールドにはM-Z32からしか入れません.
Each teams can use up to 3 robots. They must start from the square of front left (from M-Z31 to M-Z51) and can enter the field from only M-Z32.
- タスクの詳細は,以下の章にまとめますので,そちらを参照して下さい.
The detail of the tasks is summarized in the following sections and each teams can refer to them.
- フィールドは5x5のマスです.
- 2024のスケジュールはこちらです.
The schedule is here.
タスク / Tasks
- タイムスロットについて
About time slots
- 1スロット30分で,各チーム,順番にスロットを割り当てます.
A slot is 30 minutes. The slots are assigned to each teams in order.
- 1スロット30分で,各チーム,順番にスロットを割り当てます.
- タスクへの再挑戦について
About retring the task
- 30分以内であればタスクへの再挑戦が可能です.
A team may retry the task within 30 minutes.
- プログラムの修正が必要でない場合は,RefBoxの設定はそのまま再利用し,モードは,SETUP PHASEにします.
If no program modification is necessary, refbox settings are reused without modification and refbox mode is set to SETUP PHASE.
- プログラムの修正が必要な場合は,RefBoxを再起動して,機器を再配置します.
If some program modification are necessary, the refbox needs to be restarted and the machines need to be relocated.
- 30分以内であればタスクへの再挑戦が可能です.
- MPSの配置に関する原則
General rules for placing machines.
- MPSの配置については,ベルトコンベアの入出力側,棚,スライドが到達可能になるように,RefBoxが取り扱います.
For placing of machines, the refbox will take care of the necessary constraints to ensure that all input and output sides of conveyor belt, shelves and slides are reachable.
- MPSの配置については,ベルトコンベアの入出力側,棚,スライドが到達可能になるように,RefBoxが取り扱います.
- 破壊行為について
About possible damage
- フィールドやMPSに損害を与える可能性がある場合は,審判によってペナルティが与えられる.
Any possible damage to the field, opposing the machines will be penalized by the referee.
- フィールドやMPSに損害を与える可能性がある場合は,審判によってペナルティが与えられる.
1. Navigation Challenge
- Navigation Challengeは,RefBoxで指定された12個のゾーンを巡る.MPSの数は2台,3台,4台,4台(+1台)がある.
Drive to 12 randomly generated target zones by refbox. A number of available machines is 2, 3, 4 or 4(+1).
- SETUP PHASEでは,MPSの配置は,RefBoxが配置に関するルールに従って,決定する.その配置に従って,審判がMPSを設置する.
The placements of the machines are generated by the refbox and the referees must follow the placements and place the machines on the field in SETUP PHASE.
- 複数のロボットを同時に使用して,複数の目標ゾーンに到達してもよい.
Multiple robots may be used to simultaneously to reach multiple target zones.
- 配点表は,以下の通りである.
The score table is the following.
| Machines (Unknown) | Scoring | |||
| ≧ 4 zones | ≧ 8 zones | all 12 zones | combined | |
| 2 | +4 | +3 | +3 | 10 |
| 3 | +5 | +4 | +3 | 12 |
| 4 | +6 | +5 | +4 | 15 |
| 4(+1) | +7 | +6 | +5 | 18 |
2. Exploration Challenge
- Exploration Challenge は,フィールド上に配置されたMPSを報告する.
Find and report all machines on the field.
- MPSの数は2台,3台,4台がある.
A number of machines is 2, 3 or 4.
- ロボットは,MPSを発見してRefBoxに報告する必要がある.
Robots need to discover their machines and report them to the refbox.
- RefBoxは,EXPLORATION PHASEに設定する.
This challenge needs to be run by setting the refbox to phase EXPLORATION.
- MachineReportメッセージを使って,RefBoxへ報告する.
Reports are issued to the refbox using a MachineReport message.
- 各MPSは,名前によって特定され,設置されているゾーンと向きを見つけて報告しなければならない.ゾーンと向きは一度に同じメッセージで報告することも,複数のメッセージに分けて報告することもできる.RefBoxは,最初に報告された各値のみを受け取る.
For each machine, identified by its name, both its zone and its orientation (in degrees) can be explored. Both properties can be submitted at the same time in one message or be split up into multiple messages. The refbox accepts only the first submitted value for each property.
- 配点表は,以下の通りである.
The score table is the following.
| Machines | Scoring |
| 2 | 10 |
| 3 | 12 |
| 4 | 15 |
3. Grasping Challenge
- Grasping は,MPS上のベルトコンベアの出力側に置いてあるワークを入力側に運ぶことを3回実施する.MPSの数(というかRobotinoの数)は1台,2台,3台がある.
A robot brings a base from one machine's output back to its input. Repeat until all products were placed at the respective machines input 3 times and all robots returned to their starting positions. A number of machines is 1, 2, or 3.
- 各MPSの出力側にはワークがあり,ロボットはMPSの出力側の前のゾーンからスタートする.
Each Machine has a base at output. Robots start at the zone in front of a machine output.
- すべてのロボットがワークをMPSの入力側に少なくともi回置いた時,i回の繰り返しがなされたと見なされる.
The i-th repetition is considered to be successful, once all bases were placed at the respective machine input at least i times.
- BSはM-Z12,CS1はM-Z53,RS1はM-Z25に設置される.
BS is placed at M-Z12, CS1 is placed at M-Z53 and RS1 is placed at M-Z25.
- 配点表は,以下の通りである.
The score table is the following.
| Machines | Scoring | |
| first repetition | each subsequent repetition | |
| 1 | +4 | +2 |
| 2 | +6 | +2 |
| 3 | +9 | +2 |
4. Product Challenges
- Product Challengeは,全ての注文を作成する.ワークの種類は,C0,C1,C2,C3がある.MPSの数は2台,3台,4台がある.
Produce all posted orders. The available complexities are C0, C1, C2 and C3. A number of machines is 2, 3, or 4.
- 配点表は,以下の通りである.
The score table is the following.
| Machines | Challenge type | Scoring |
| 2 | C0 | 10 |
| 3 | C1 | 12 |
| 3 | C2 | 15 |
| 4 | C2 | 15 |
| 3 | C3 | 20 |
| 4 | C3 | 20 |
5. Exploration + Production Challenges
- Exploration + Production Challengesは,Production Challengesと同じく,全ての注文を作成するが,MPSの位置はロボットに伝えられない.
The same challenge as Product Challenges but without receiving the machine positions.
- 得点は,Production Challengesの対応する点数に5点追加した点数となる.
The same point scores as Product Challenges apply with an additional +5 per challenge.
- 配点表は,以下の通りである.
The score table is the following.
| Machines | Challenge type | Scoring |
| 2 | C0 | 15 |
| 3 | C1 | 17 |
| 3 | C2 | 20 |
| 4 | C2 | 20 |
| 3 | C3 | 25 |
| 4 | C3 | 25 |
6. Simulation Challenge
- Simulation Challengeは,全てRCLL Simulator上で行い,C3を配達する.
In this Challenge a full game has to be played using the RCLL Simulator. The goal is to deliver a C3.
- ロボットの数は,2台,3台がある.
Either two or three robots have to be used, each of them has to perform at least one retrieve and one deliver task.
- 配点表は,以下の通りである.
The score table is the following.
| Robots | Scoring |
| 2 | 10 |
| 3 | 15 |
7. Markerless Detection Challenge
- Markerless Detection Challengeでは,マーカは取り除かれるか,もしくは,隠される.センサでMPSを認識することができるが,マーカやその他の目印といった類のものをMPSや環境に追加することはできない.
For this challenge, the markers will be removed or otherwise hidden. Any sensor feedback is allowed to recognize the machine, but no kind of markers or other indicators is allowed to be added to the machine or the environment.
- MPSの数は1台,ロボットの数も1台であり,ロボットの正面にMPSを設置する.
The number of the machine is 1, The number of the robot is also 1 and the machine is placed on the front of the robot.
- ロボットは,正面に置かれたMPSの種類を識別し,RefBoxに送信する.
The robot need to identify the machine type and send the information to the refbox.
- 配点表は,以下の通りである.
The score table is the following.
| Report | Score |
| Correct | 15 |
| Incorrect | 0 |
使用する機器・備品等について / Devices and equipments
グリッパー / Gripper

世界大会のルールと同様です.
https://github.com/robocup-logistics/rcll-rulebook/blob/master/rulebook.tex
The robots peripherals must not exceed the maximum total height of 1.6[m] including the tower and the table on top.
高さは,1.6mが規定です.
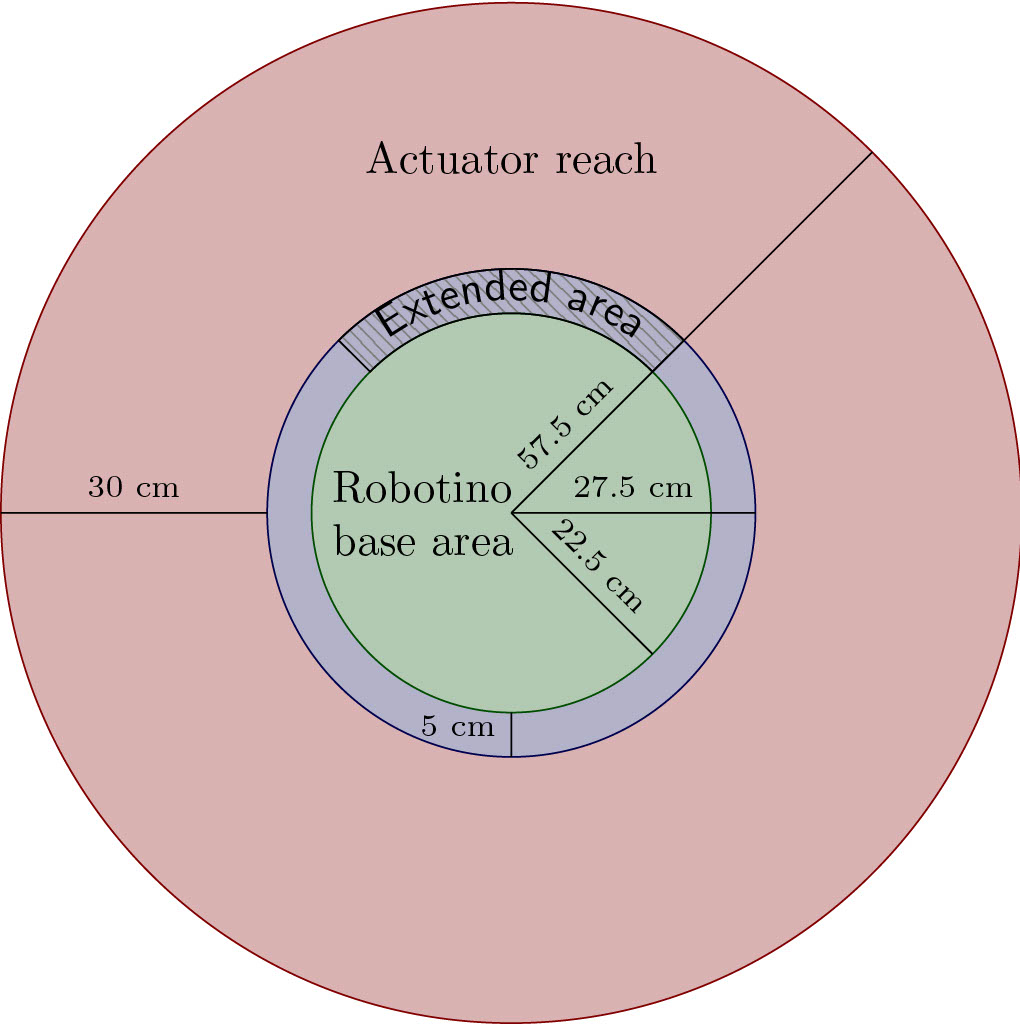
Additional hardware (sensors, computing equipment, etc.) must be within a circle of a diameter of 0.55[m] or centered at the robot's rotational center-point (see figure).
追加機器は,ロボットの中心を通る0.55mの直径以内に設置すること. (Robotino 3の直径が45cm程度ですので,5cm程度のはみ出しが可能) (図を参照のこと)
Additional hardware may only occupy up to 25% of this additional 0.05[m] wide ring around the robot.
追加機器は,この追加の5cmの外周のうち,25%以内に抑えること.
In the resting position and while driving it also must not exceed the robot diameter by more than this 5cm, including workpiece.
通常時や走行時は,この5cmのはみ出し以内に抑えていること.
In front of a machine and during a production process, the gripper may be extended up to 30cm. But it is only allowed to reach a maximum of 15cm into the machine area.
MPSの正面で生産作業をするときは,グリッパーは30cmまで伸びて良い.
しかし,MPSの領域に入って良いのは最大15cmまでである.
(30cmは,MPSとRobotino 間の距離が少しある場合を考慮していますね)
MPS
The stations have a rectangular base shape of 0.35mx0.7m with a height of about 1m depending on machine type.
MPSは0.35mx0.7mの長方形の土台を持っており,MPSによるが,約1mの高さである.
All physical interfaces like conveyor belt inputs and outputs, shelves, and slides for additional bases on ring stations are accessible at 89.8 cm height.
ベルトコンベアの入力側,出力側,棚,スライドのようなすべての物理的なインターフェイスは89.8cmの高さで到達可能である.
Working space between guiding lanes is 4.5 cm.
ガイドレーン間の作業スペースは,4.5cmである.
To simplify the delivery on the belt, each machine will be equipped with a narrowing cone on its input side.
ベルトコンベアへの入力を単純化するため,各MPSの入力側にnarrowing coneが装着される.
Each machine can be equipped with two markers based on ARUCO AR tags, one placed on the input, another one on the output side.
各MPSの入力側,出力側のそれぞれにARUCO ARタグに基づくマーカーを付けることができる.
The externals of the machines are show in these videos.
MPSの外観は,これらの動画で示される.
ワーク / Work
レフェリーの仕事 / Tasks of the referee
- 各チャレンジには,RefBoxレフェリーとフィールドレフェリーの2人のレフェリーがいる.
There are two referee, refbox referee and field referee on each Challenge Tracks.
RefBoxレフェリーの仕事 / Tasks of the refbox referee
- 主な仕事は,
The main task is
フィールドレフェリーの仕事 / Tasks of the field referee
- 主な仕事は,
The main task is
Attachments (8)
-
challenge-field2021.pdf
(54.3 KB
) - added by 2 years ago.
Challenge Track field
-
challenge-field2021.jpg
(78.7 KB
) - added by 2 years ago.
Challenge Track field
-
dimensions.pdf
(30.7 KB
) - added by 2 years ago.
Figure about robot dimensions
-
dimensions.jpg
(90.7 KB
) - added by 2 years ago.
Figure about robot dimensions
- JapanOpen2024_MPS_DS.mp4 (38.3 MB ) - added by 2 years ago.
- JapanOpen2024_MPS_RS.mp4 (37.2 MB ) - added by 2 years ago.
- JapanOpen2024_MPS_BS.mp4 (39.5 MB ) - added by 2 years ago.
- JapanOpen2024_MPS_CS.mp4 (40.2 MB ) - added by 2 years ago.
{kind=link}
{kind=link}
{kind=link}
{kind=link}