Introduction / はじめに
This rulebook addendum provides a competition in the RoboCup logistics
league domain, where the main tasks of the league are captured in isolated
challenges.
このルールブックは,RoboCup logistics leagueの競技であり,リーグの主なタスクが独立した課題に取り込まれた競技を提示します.
The objectives of this new competition are:
この新しい競技の目的は次の通りです.
- to provide a framework that allows teams to show and evaluate their progress in the individual tasks of the RCLL
- to ease the preparation for the main competition through providing a simplified cost- and space-efficient setup suitable for replication in local labs
- to be attractive for both RoboCup live events and online competitions, where teams can participate remotely from all over the world
- チームがRCLLの個々のタスクの進捗を表示および評価できるフレームワークを提供する
- 各研究室での(競技の)複製に適した,コストとスペースが簡素化されたセットアップを提供することで,主要な競技の準備を容易にする
- チームが世界中からリモートで参加できるRoboCupライブイベントとオンラインコンテストの両方に魅力的である
This document is not self-sufficient, instead all the rules from the main
rulebook apply, unless stated otherwise.
The proposed format is carried out at RoboCup 2021, which is held remotely.
Hence the remainder of this document establishes the rules around the online
competition.
このドキュメントは独立したものではなく,特に明記されていない限り,メインのルールブックのすべてのルールが適用されます.
提案されたフォーマットは、リモートで開催されるRoboCup2021で実行されます。
したがって,このルールブックの残りの部分では,オンライン競技に関するルールを確立します.
Qualification / 参加資格
In addition to the regular Qualification process, teams have to participate
in a RefBox workshop
To complete the workshop, a game report dump of at least two Challenges
has to be submitted to the OC.
通常の選考過程に加えて,チームはRefBox勉強会に参加する必要があります.
ワークショップを完了するには,少なくとも2つのチャレンジのゲームレポートを組織委員会(OC)に提出する必要があります.
※ 今回のRCAP2021では,世界大会参加経験チームのみが参加しているので,この部分は省略しています.
Requirements to score points / 得点を獲得するための要件
For your challenges to count as completed and score points you need to submit
チャレンジを完了としてカウントし、ポイントを獲得するには、
- the recorded video footage
- your game reports from the MongoDB
- 記録されたビデオ映像
- MongoDBによるゲームレポート
to the OC.
をOCに提出する必要があります.
Your submission will not be counted if the footage shows human
interference with the field, machines or robots outside of
the specified rules in Section 5.3.
5.3節で指定されたルール以外で,人によるフィールド・機械・またはロボットへの干渉を映像が示している場合,提出物はカウントされません.
Competition Area / 競技エリア
Field Layout / フィールドのレイアウト
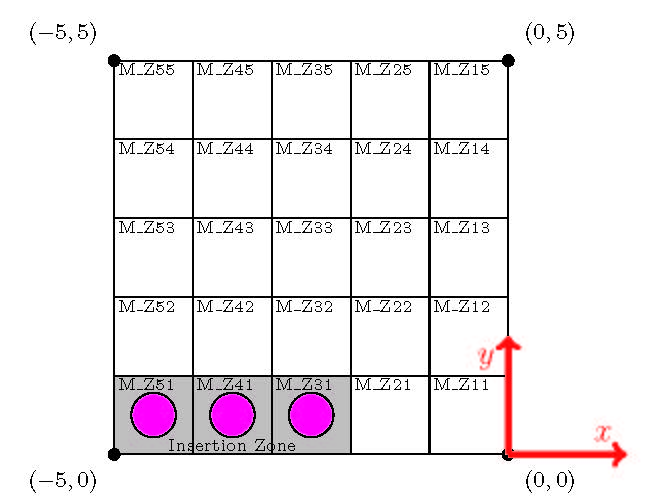
 The competition area for the main challenges consists of a 5x5 [m]
area divided in square zones of 1x1 [m]. Additional challenges that
are not counting towards the scoring of the competition are carried out on
a 7x8 [m] field instead (corresponding to half the field of the
regular RCLL field).
The field is a subset of the magenta-half of the regular field as depicted
in Figure 1.
The competition area for the main challenges consists of a 5x5 [m]
area divided in square zones of 1x1 [m]. Additional challenges that
are not counting towards the scoring of the competition are carried out on
a 7x8 [m] field instead (corresponding to half the field of the
regular RCLL field).
The field is a subset of the magenta-half of the regular field as depicted
in Figure 1.
メイン課題の競技エリアは,5x5 [m] のエリアで1x1 [m] の正方形で分割されています.
競争の得点にカウントされない追加のチャレンジは,代わりに7x8 [m]のフィールドで実行します(通常のRoboCup Logistics League(RCLL)のフィールドの半分に対応します).
このフィールドは,図1に示すように、通常のフィールドのマゼンタ側の半分です.
The entire area belongs to a single team. The bottom left-most
1x3 [m] area is called the insertion zone and provides the starting
positions for up to three robots.
Contrary to the full RCLL field, it is not necessary to build partial walls
around the insertion zone and robots may be move freely in and out of the
insertion zone.
エリア全体が1つのチームに割り当てられています.
左下の1x3 [m]の領域は挿入ゾーンと呼び,最大3台のロボットの開始位置になります.
通常のRCLLのフィールドとは異なり,挿入ゾーンの周囲に部分的な壁を構築する必要はなく,ロボットは挿入ゾーンの内外を自由に移動できます.
Teams can play as either cyan or magenta, but the field is always the magenta
one depicted in Figure 1. Machine positions published by
the refbox place the machines of both teams on the same location (e.g., M-BS
and C-BS are both placed at M_Z12 in the field of Figure 1.
チームはシアンまたはマゼンタのいずれかでプレイできますが,フィールドは常に図1に示すマゼンタです.
RefBox によって公開されたマシンの位置は,両方のチームのマシンを同じ場所に配置します(たとえば、M-BSとC-BSは両方とも図2のフィールドのM_Z12に配置されます).
Mockup Machines / モックアップマシン
In case no real MPS stations are available, replications
(so called mockup machines) may be used, that do not need to
physically perform the respective production steps. Instead, that work may
be carried out by a human supervisor (see Section 5.3).
The minimum requirements for a mockup machine are specified in the following.
実際のMPSが利用できない場合は,それぞれの生産ステップを物理的に実行する必要のないレプリカ(いわゆるモックアップマシン)を使用できます.
代わりに,その作業は人間の監督者によって実行される場合があります(5.3節を参照).
モックアップマシンの最小要件は、以下に指定されています.
Mockup machines are required to have the same box-like base shape as specified
in the RCLL rulebook.
Additionally, the following parts need to be mounted:
モックアップマシンは,RCLLルールブックで指定されているのと同じ箱のような基本形状である必要があります.
さらに,次の部品を取り付ける必要があります.
- a model of the conveyor belt
- a shelf on the front right side of the box on stations replicating a CS
- either a shelf, a slide or a conveyor belt on the front right side of the box, such that it is accessible from the front on stations replicating a RS
- ベルトコンベア
- キャップステーション(CS)の複製には,ボックスの右前に棚が設置されている.
- リングステーション(RS)の複製には,ステーションの正面からアクセスできるようにボックスの右前に棚,スライド,またはコンベヤーベルトのいずれかを設置する.
Models for a conveyor belt, shelf and slides can be found in the RCLL rulebook repository.
コンベヤーベルト,棚,スライドのモデルは,RCLLルールブックリポジトリに掲載されます.
The building materials for the models must be opaque, but may have any color.
モデルの材料は不透明である必要がありますが,色は任意です.
In order to compete in all main challenges, a minimum number of 3 mockup
machines are required. On higher difficulty some challenges may require
4 mockup stations and some secondary challenges require 7 stations.
すべての主要な課題に対処するには,最低3台のモックアップマシンが必要です.
より高い難易度では,いくつかのチャレンジは4つのモックアップステーションを必要とし,いくつかの二次的なチャレンジは7つのステーションを必要とします.
Remote Setup / 遠隔用の設定
In case a competition is carried out remotely, a proper local setup has to
be established and approved by the OC.
Requirements include a proper camera setup that covers the field sufficiently,
such that external viewers can verify the integrity of each challenges,
as well as an approval for every mockup machine and robot that is used.
After registration the OC will verify the field setup in a video call.
The validation call will be scheduled individually for each team
to account for timezones.
競技がリモートで行われる場合,適切なローカル設定が確立され,OCによって承認される必要があります.
要件には,外部の視聴者が各チャレンジの整合性を検証できるように,フィールドを十分にカバーする適切なカメラセットアップ,および使用されるすべてのモックアップマシンとロボットの認証が含まれます.
登録後,OCはビデオ通話でフィールド設定を確認します.
検証通話は,タイムゾーンを考慮してチームごとに個別にスケジュールされます.
※これも,世界大会で検証済みのため,今回は省略.
When challenges are played remotely, a video recording of the live-streams
hast to be sent to the OC.
チャレンジをリモートで実行する場合は,ライブストリームのビデオ録画をOCに送信する必要があります.
Game Play / 競技
Competition Scope / 採点
Each team can attempt a challenge by specifying a 30 minute time slot along with the challenge in advance of the respective competition day. The announcement procedure is managed by the OC. Each slot can be used to do at most one challenge and is split in two phases: 各チームは,それぞれの競技日の前にチャレンジと一緒に30分の時間枠を指定することにより,チャレンジを試みることができます. 発表手順は,OCによって管理されています. 各スロットは,最大で1つのチャレンジを実行するために使用でき,2つのフェーズに分割されます:
- In the SETUP phase the participants ensure that
- セットアップフェーズで,参加者は次のことを確認します
- the video stream is setup via Zoom,
- the RefBox is started with the appropriate settings for the challenge,
- the machines and robots are placed on the field according to the rules
- and the robots are started.
- ビデオストリームが,Zoomでセットアップされていること.
- RefBoxが,チャレンジに適切な設定で起動されていること.
- マシンとロボットが,ルールに従ってフィールドに配置されていること.
- ロボットが起動されていること.
The setup must be completed within 10 minutes, otherwise the attempt is counted as a failure. セットアップは10分以内に完了する必要があります. そうでない場合,試行は失敗としてカウントされます.
- Then the PRODUCTION phase starts by instructing the RefBox accordingly. During the production phase the team has 20 minutes to solve the challenge.
- 次に,!RefBoxを扱うことで,生産フェーズが開始します.生産フェーズでは,チームは20分の時間をかけて,チャレンジを解決することができます.
A team may retry the challenge by
チームは次の方法でチャレンジをやりなおせます..
- setting the RefBox back to the setup phase
- resetting the field setup accordingly
- and then starting the production phase again.
- RefBox をセットアップフェーズに戻す
- それに応じてフィールド設定をリセットする
- そして,生産フェーズを再開する
Only the last attempt in each slot can be counted. A team may decide to count
no attempt at all. Once a challenge is counted, it
may not be retried again, unless the difficulty is increased.
In order to complete an attempt, the RefBox needs to be set to phase
POST_GAME.
各スロットでの最後の試行のみが採点対象となります.
チームは,すべての試行を採点対象としないことを決定できます.
チャレンジが採点されると,難易度を上げない限り,再試行することはできません.
試行を完了するには,RefBox をPOSTGAMEに設定する必要があります.
All challenges are conducted while measuring the execution time of the
corresponding attempt, starting from the begin of the PRODUCTION phase
and ending at the begin of POST_GAME.
The fastest team to complete a challenge on the selected difficulty gains 5
additional points. A challenge is only completed if the full score is achieved,
so getting only partial credits for a challenge disqualifies from getting the
bonus points for the fastest completion.
すべてのチャレンジは,対応する試行の実行時間を測定しながら実行されます.
PRODUCTIONフェーズを選んだ時点から始まり,POSTGAMEを選んだ時点で終了します.
選択した難易度でチャレンジを完了した最速のチームは,さらに5ポイントを獲得します.
チャレンジは,フルスコアが達成された場合にのみ完了するため,部分的なチャレンジのみを達成した場合は,時間ボーナスを取得できません.
Changes compared to the Main Competition / メイン競技との変更点
The tasks covered in the various challenges have to be executed following the
regular rules for the RCLL, unless stated otherwise.
However, some aspects are altered to simplify the setup.
The changes are not affecting existing machine communication and processing
steps, such that the challenges can be carried out on real machines as well as
on mockup versions obeying the requirements outlined in Section 4.2.
複数チャレンジが含まれたタスクは,特に明記されていない限り,RCLLの通常のルールに従って実行されます.
ただし,セットアップを簡素化するために一部のルールは変更されています.
変更は既存のマシンの通信および処理ステップに影響を与えないため,4.2節で説明されている要件に従って,実際のマシンおよびモックアップバージョンでチャレンジを実行できます.
Product Delivery / 製品の配送
The delivery procedure for finished products is altered compared to the
RCLL rule set. In order to reduce the amount of machines required
for participation, Deliveries are made by bringing the finished product
to the insertion zone and dropping it there.
完成品の配送手順は,RCLLルールから変更されています.
参加に必要な機械の数を減らすために,完成品を挿入ゾーンに持ってきてそこに落とすことによって配達が行われます.
Ring Payments / リングの支払い
Easing the setup of mockup machines, it is not required to have a slide on ring stations. Instead, a shelf or additional conveyor may be mounted on the machine to place payments at the corresponding station. モックアップマシンのセットアップが簡素化されたので,RSにスライドを置く必要はありません. 代わりに,対応するステーションで支払いを行うために,棚または追加のコンベヤーをマシンに載せます.
Ring Color Assignment / リングの色の割り当て
The cost for mounting each ring color are fixed, the assignment of ring colors is semi-fixed as teams can choose between two different options for each challenge option1 or option2 according to Table 1. The RefBox settings default to option1, but teams may change this accordingly. 各リングの色を取り付けるためのコストは固定されており,チームは各チャレンジに対して2つの異なるオプション(表1によるオプション1またはオプション2)から選択できるため,リングの色の割り当ては半固定です. RefBox はoption1に設定されているが,チームはそれに応じて変更できます.
\newcommand{\colconfig}{\mathcal{RC}} \begin{table}[!htb]
\centering
\begin{tabular}{l|l|l l|l l|l}
& \multicolumn{4}{c }{Ring Costs} & \multicolumn{2}{c}{\multirow{2}{*}{Color Assignment }}
\cline{2-5} & Color & Price & Color & Price & \multicolumn{2}{c}{}
\cline{2-7} & Yellow & 0 & Green & 0 & RS1: $\colconfig_1$ & RS1: $\colconfig_2$
& Blue & 1 & Orange & 2 & RS2: $\colconfig_2$ & RS2: $\colconfig_1$
\hline\hline
Configuration & \multicolumn{2}{c }{$\colconfig_1$} & \multicolumn{2}{c }{$\colconfig_2$} & $\texttt{option1}$ & $\texttt{option2}$
\end{tabular} \caption{Materials} \label{tab:ring-costs}
\end{table}
Materials
The available material that can be used per challenge is restricted (unless stated otherwise) per machine according to the information in \reftab{tab:materials}. \begin{table}[!htb]
\centering
\begin{tabularx}{\linewidth}{l|l}
Machine & Available Material
\hline \ac{BS} & 2 bases of each color
\ac{CS} & 3 cap-carriers (cap color choices up to each team)
\ac{RS} & 4 rings of each assigned color (8 in total)
\end{tabularx}
\caption{Materials} \label{tab:materials}
\end{table}
Orders
Unless specified otherwise, orders that have to be fulfilled in challenges are entered through the web shop (see the RefBox workshop in \refsec{sec:qualification}) by any member of the team.
In challenges where only one \ac{RS} is present, teams are responsible to order products which can be assembled using the available stations only.
Scoring
While the RefBox may assign points during challenges according to the regular RCLL rules, those points do not count towards this competition. Instead, the point scoring for each challenge is listed in \refsec{sec:challenges}.
Field Operators
In challenges where mockup machines are used, the actual assembly steps have to be performed by human supervisors. Whenever a machine is instructed, the RefBox operator announces the required interaction. One field operator may proceed to enter the field in order to perform the interaction. Afterwards the field has to be left immediately. The usual rules for replenishing resources (respecting the limited materials \refsec{sec:materials}) apply.
Available Challenges for the Primary Competition
Challenges have different types and variations (difficulty levels). The overall score of the competition is calculated by summing up the score in the highest difficulty achieved in each of the challenge types. The challenge types of the competition are described in \refsec{sec:challenge-navigation}-\ref{sec:challenge-markerless}.
The RefBox is used to log the progress and data for each challenge. Participating teams are required to send the corresponding game report dumps to the \ac{OC}. Once the competition is finished, $5$ bonus points are awarded each time a team solved a challenge on a difficulty in the shortest amount of time.
Navigation Challenge
Basic navigation task with known obstacles.
\textbf{Task:} Drive to 12 randomly generated target zones. A target zone is
reached, if any robot remains in that zone for at least 5 consecutive seconds.
The pose of each robot must be set in the beacon message
for the RefBox to properly register the zones as visited. The robot may move
within the zone during the 5 second period.
Variations of this challenge depend on the number of available machines
(see \reftab{tab:challenge-navigation}).
Multiple robots may be used to simultaneously to reach multiple target zones.
Partial points may be awarded in case only a subset of target zones were
reached, which are accumulated if the challenge is completed fully.
\begin{table}[!htb]
\centering \begin{tabular}{l|l|l|l|l}
\multirow{2}{*}{Machines} & \multicolumn{4}{c}{Scoring}
\cline{2-5}& $\geq$ 4 zones & $\geq$ 8 zones & all 12 zones & combined
\hline\hline2 & +2 & +4 & +9 & 15
3 & +3 & +6 & +14 & 23
4 & +4 & +8 & +18 & 30
\end{tabular} \caption{Navigation Challenge} \label{tab:challenge-navigation}
\end{table}
Exploration Challenge}\label{sec:challenge-exploration
Replicate the RCLL exploration phase.
Machine Marker detection as well as navigational skills are required to solve
this challenge.
\textbf{Task:} Find and report all machines on the field (type and orientation)
according to the rules of a regular exploration phase.
Variable in the number of machines
(see \reftab{tab:challenge-exploration}).
\begin{table}[!htb]
\centering \begin{tabular}{l|l}
Machines & Scoring
\hline 2 & 10
3 & 20
4 & 30
\end{tabular} \caption{Exploration Challenge} \label{tab:challenge-exploration}
\end{table} This challenge needs to be run by setting the RefBox to phase \texttt{EXPLORATION}.
Grasping Challenge}\label{sec:challenge-grasping
Simple grasping task.
Each Machine has a base at output.
Robots start at the zone in front of a machine output.
\textbf{Task:} A robot brings a base from one machine's output back to its
input. A human supervisor places it back to the output. Repeat until all
products were placed at the respective machines input 3 times and all robots
returned to their starting positions.
Variations differ by number of machines, see
\reftab{tab:challenge-grasping}. The $i$-th repetition is considered to be
successful, once all bases were placed at the respective machine input
at least $i$ times.
The placement of the machines on the field is fixed according to
\reffig{fig:grasping-field}.
In order to load the fixed field shown in \reffig{fig:grasping-field}, a corresponding game report\footnote{\url{https://github.com/robocup-logistics/rcll-refbox/blob/tviehmann/challenges-2021/benchmarks/grasping_challenge.gz}} % chktex ignore-long-line can be restored in the RefBox using the supplied script.\footnote{\url{https://github.com/robocup-logistics/rcll-refbox/blob/tviehmann/challenges-2021/etc/scripts/restore_reports.bash}} % chktex ignore-long-line In order to load the field setup, specify tha report to laod from and disable field randomization in the RefBox configuration as shown in \reflst{lst:restore-field}.
\begin{lstlisting}[language=yaml,basicstyle=\small, caption={RefBox configuration to load grasping challenge field}, captionpos=b, label={lst:restore-field}, frame=single] random-field: false ... # load data from latest game report with a given name # leave empty to always load from latest stored report load-from-report: "GraspingChallenge"
\end{lstlisting} \begin{table}[!htb] \centering
\begin{tabular}{l|l|l}
\multirow{2}{*}{Machines} & \multicolumn{2}{c}{Scoring}
\cline{2-3} & first repetition & each subsequent repetiton
\hline\hline 1 & +10 & +2
2 & +20 & +2
3 & +25 & +2
\end{tabular} \caption{Grasping Challenge} \label{tab:challenge-grasping}
\end{table}
\begin{figure}
\centering \begin{tikzpicture}[x=-1cm,y=1cm] \fill[gray!50!white] (2,0) rectangle (5,1); \node at (3.5,0) [anchor=south, font=\tiny, inner sep=1pt] {Insertion Zone}; \foreach \i in {0,...,5} {
\draw (0,\i) -- (5,\i); \draw (\i,0) -- (\i,5);
} \foreach \x in {1,...,5} {
\foreach \y in {1,...,5} {
\node[font=\tiny,anchor=north west, inner sep=1pt] at (\x,\y) {M\_Z\x\y};
}
}
\node at (4.5,1.5) [circle,fill=magenta, draw=black,inner sep=0.2cm] {}; \node at (4.5,2.5) [rectangle,fill=green!30!white, draw=black,
inner sep=0.1pt,align=center,font=\tiny] {input
output};\node at (0.5,0.5) [circle,fill=magenta, draw=black,inner sep=0.2cm] {}; \node at (0.5,1.5) [rectangle,fill=green!30!white, draw=black,
inner sep=0.1pt,align=center,font=\tiny] {input
output};\node at (0.5,4.5) [circle,fill=magenta, draw=black,inner sep=0.2cm] {}; \node at (1.5,4.5) [rectangle,fill=green!30!white, draw=black,
inner sep=0.1pt,align=center,font=\tiny,rotate=90] {input
output};
\end{tikzpicture} \caption{Starting configuration for the grasping challenge.
BS is placed at $\texttt{M\_Z12}$, CS1 is placed at $\texttt{M\_Z53}$
and RS1 is placed at $\texttt{M\_Z25}$.}
\label{fig:grasping-field}
\end{figure}
Product Challenges
This section covers four types of challenges, which all can be individually
completed.
Each challenge corresponds to the production of a product with one of the
available complexities (C0, C1, C2, C3) in the \ac{RCLL} using either
one or two \ac{RS}.
For complexities C1, C2 and C3 the accumulated cost for mounting the required
rings must be equal to 1, 2 and 3, respectively.
\textbf{Task:} Produce all posted orders.
\begin{table}[!htb]
\centering \begin{tabular}{l|l|l}
Machines & Challenge type & Scoring
\hline 2 & C0 & 30
3 & C1 & 50
4 & C1 & 50
3 & C2 & 70
4 & C2 & 70
3 & C3 & 100
4 & C3 & 100
\end{tabular} \caption{CX Challenge} \label{tab:challenge-cx}
\end{table}
Exploration + Production Challenges
The same challenge as in \refsec{sec:challenge-cx} but without receiving the machine positions. Hence exploration and production takes place concurrently. The same point scores as in \reffig{tab:challenge-cx} apply with an additional $+20$ per challenge
Markerless Detection Challenge
Image recognition challenge to classify different machine types.
\textbf{Task:} Autonomously label the machines shown in a set of pictures
by their type.
A picture may contain more than one machine, which all count towards the
total number of machines to detect. Labels must be placed on the machines
within the picture. Machines are distinguished by their types
(BS, CS, RS, DS, SS).
As a preparation for this challenge, a data set will be supplied to
all participants which may be used for training and testing
purposes\footnote{\url{https://fh-aachen.sciebo.de/s/MRghypMQSMhTYaC}}.
The evaluation set for the challenge consists of a set of separate images that
is encrypted and distributed in advance of attempting the challenge.
The password to decrypt the evaluation set is given out when the challenge
is attempted.
This challenge can only be attempted once to avoid improper use of the
evaluation set.
The points scored are calculated based on the relative amount of correctly
and wrongly classified machines (across all types) according to
\reftab{tab:challenge-markerless}. So a total amount of 30 points can be scored
if all machines of all types are correctly classified.
\begin{table}[!htb]
\centering \begin{tabularx}{\linewidth}{l|l|l|l}
\% Correctly Classified & \% Wrongly Classified & \% Not Classified & Scoring
\hline $x$ & $y$ & $z$ & $(x-y)\cdot30$\end{tabularx} \caption{Machine Detection Challenge} \label{tab:challenge-markerless}
\end{table}
In order to verify the labeling, each team must presents the labeled data within the time slot (e.g., via screen-sharing when participating remotely). Additionally, the labeled data has to be sent to the \ac{OC}.
Challenges for the Secondary Competition
Full game
Play the production phase of an RCLL game on a field of \SI{7 x 8}{\metre} with $7$ machines (no machines from the opposing team). The normal RCLL rules apply with the exception that the ground truth for machine positions is not sent by the RefBox.
Attachments (1)
-
figure1.jpg
(37.8 KB
) - added by 5 years ago.
The 5m × 5m playing field.
{kind=link}
Download all attachments as: .zip