| Version 2 (modified by , 2 years ago) ( diff ) |
|---|
"""= 編集中 Under edit ="""
RoboCup JapanOpen 2024 Logistics League
競技概要

- タスクは,RCLL Rulebook 2023のChallenge Trackになります.
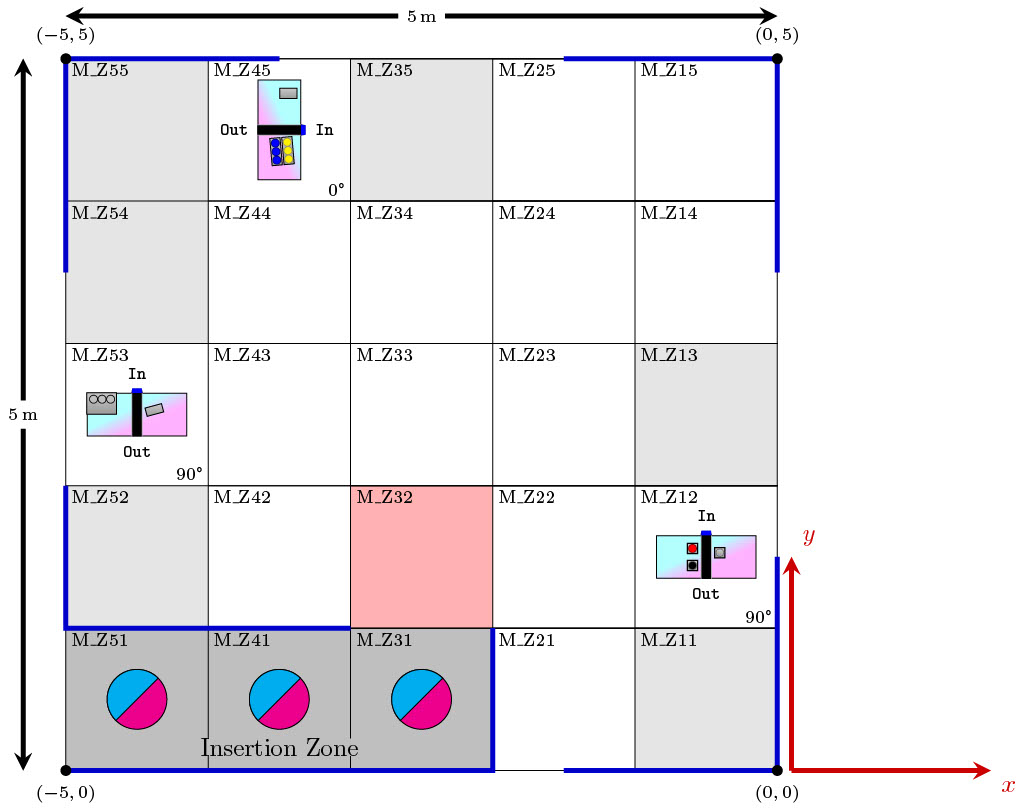
- フィールドは5x5のマスです.
- 図はRCAP2021のルールブックのフィールド図です.
- JapanOpen2020 では,ロボットは1台,手前真ん中のマス(M-Z31)からスタートです.
RCAP2021GermanOpen2023 では,ロボットは3台まで使用可,手前左のマス(M-Z31からZ51)からスタートし,フィールドにはM-Z32からしか入れません.- タスクの詳細は,以下の章にまとめますので,そちらを参照して下さい.
- 2024のスケジュールは, です.
タスク
- 30分以内であれば競技への再挑戦が可能であり,30分を越えたら再度競技の選択から行う形を取って下さい.
- 具体的には,機器などの配置(サイコロによるランダム割り当て)をやり直さない/やり直すの違いになります.
- ただし,競技への再挑戦時にプログラムの修正は認めません.
- 修正が必要な場合は,次のスロットとしての実施となり,サイコロの振り直しが必要になります.
- (ランダム性のない競技の場合は,プログラムの修正可能ってことになりますね)
1. Navigation
- Navigation は,RefBoxで指定された12個のゾーンを巡る.MPSの数は2台(level=4),3台(level=5),4台(level=5)がある.
MPS2台の時の満点が15点であるため,RCAP2021の得点+35点を本大会の得点としますMPS2台の時の満点が20点であるため,世界大会2022の得点+30点を本大会の得点としますMPS2台の時の満点が10点であるため,世界大会2023の得点+40点を本大会の得点とします.
2. Exploration Challenge
- Exploration Challenge は,RefBoxで指定された場所に配置されたMPSの種類と向きを報告する.MPSの数は2台(level=4),3台(level=5),4台(level=5)がある.MPS2台の時の満点が10点であるため,RCAP2021の得点+40点を本大会の得点とします.
3. Grasping Challenge
- Grasping は,OutputのワークをInputに運ぶことを3回実施し,MPSの数(というかRobotinoの数)は1台(level=4),2台(level=5),3台(level=5)がある.
MPS1台の時の満点が14点であるため,RCAP2021の得点+36点を本大会の得点としますMPS1台の時の満点が10点であるため,世界大会2022の得点+40点を本大会の得点とします.
4. Product Challenges
C0の時の満点が30点であるため,RCAP2021の得点+20点を本大会の得点とします.- C0の時の満点が10点であるため,世界大会の得点+40点を本大会の得点とします.
5. Markerless Detection Challenge
- 学習セットはRCAP2021と同じファイルを用います.
- 競技時の評価セットは,大会会場で撮影したものを配布します.他の課題と同様に再挑戦できるようにしますので,評価セットは複数準備しておき,スロット毎に別の評価セットを配布します.
最低得点は0点であるため,RCAP2021の得点+50点を本大会の得点とします(ただし,0点の時は0点)- 最高得点が30点であるため,RCAP2021の得点×2倍を本大会の得点とします.
6. Exploration + Production Challenges
- 今回は用意しません….
使用する機器・備品等について
グリッパー / gripper
世界大会のルールと同様です.
https://github.com/robocup-logistics/rcll-rulebook/blob/master/rulebook.tex
The robots peripherals must not exceed the maximum total height of 1.1[m] including the tower and the table on top.
高さは,一応,1.1mが規定です.
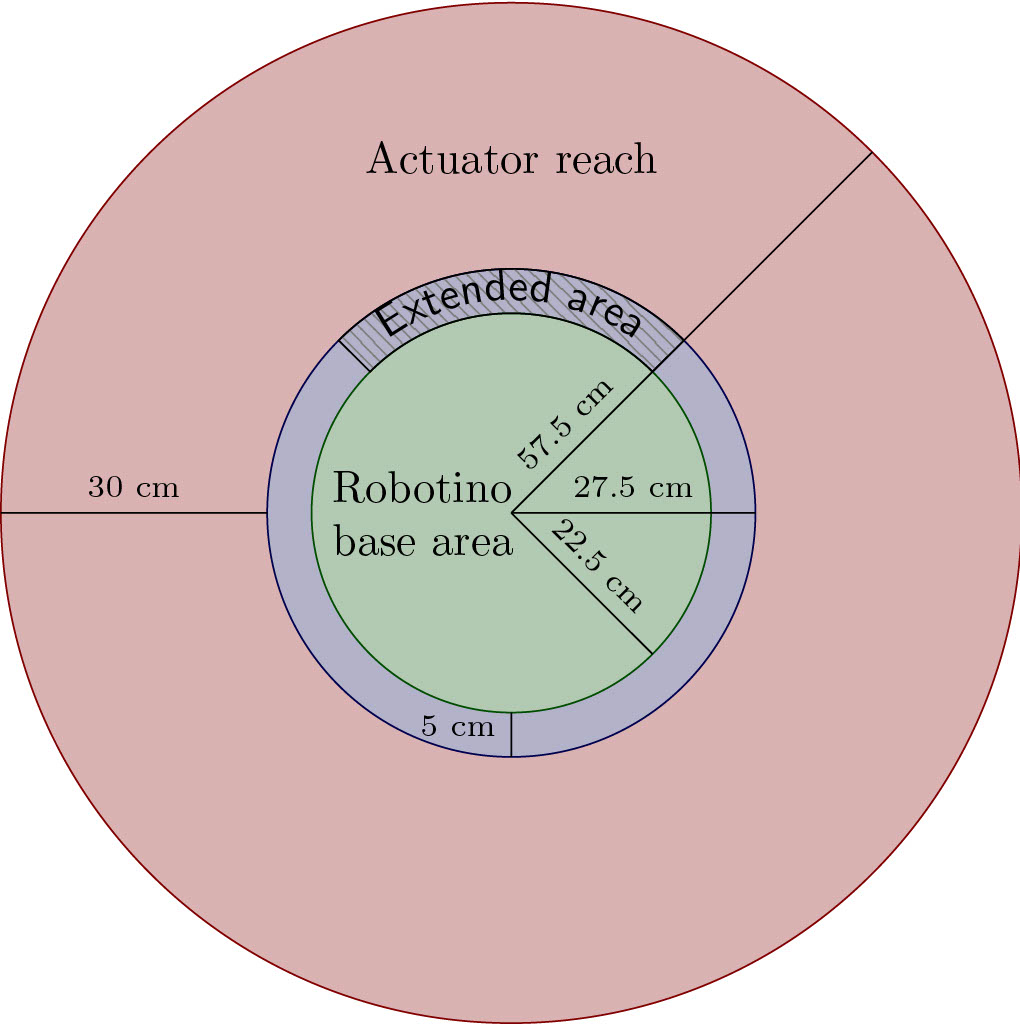
Additional hardware (sensors, computing equipment, etc.) must be within a circle of a diameter of 0.55[m] or centered at the robot's rotational center-point.
追加機器は,ロボットの中心を通る0.55mの直径以内に設置すること. (Robotino 3の直径が40cm程度ですので,5cm程度のはみ出しが可能)
Additional hardware may only occupy up to 25% of this additional 0.05[m] wide ring around the robot.
追加機器は,この追加の5cmの外周のうち,25%以内に抑えること.
In the resting position and while driving it also must not exceed the robot diameter by more than this 5cm, including workpiece.
通常時や走行時は,この5cmのはみ出し以内に抑えていること.
In front of a machine and during a production process, the gripper may be extended up to 30cm. But it is only allowed to reach a maximum of 15cm into the machine area.
MPSの正面で生産作業をするときは,グリッパーは30cmまで伸びて良い.
しかし,MPSの領域には行って良いのは最大15cmまでである.
(30cmは,MPSとRobotino 間の距離が少しある場合を考慮していますね)
ワーク / work
Attachments (8)
-
challenge-field2021.pdf
(54.3 KB
) - added by 2 years ago.
Challenge Track field
-
challenge-field2021.jpg
(78.7 KB
) - added by 2 years ago.
Challenge Track field
-
dimensions.pdf
(30.7 KB
) - added by 2 years ago.
Figure about robot dimensions
-
dimensions.jpg
(90.7 KB
) - added by 2 years ago.
Figure about robot dimensions
- JapanOpen2024_MPS_DS.mp4 (38.3 MB ) - added by 2 years ago.
- JapanOpen2024_MPS_RS.mp4 (37.2 MB ) - added by 2 years ago.
- JapanOpen2024_MPS_BS.mp4 (39.5 MB ) - added by 2 years ago.
- JapanOpen2024_MPS_CS.mp4 (40.2 MB ) - added by 2 years ago.
{kind=link}
{kind=link}
{kind=link}
{kind=link}